Chaoxiang Ye
Ph.D. candidate at TU Delft, supervised by Prof. Guido de Croon and Dr. Salua Hamaza.
Micro Air Vehicle Lab · BioMorphic Intelligence Lab · Delft University of Technology
I received my joint M.Eng. degree from Southern University of Science and Technology (SUSTech) and Shenzhen Institute of Advanced Technology (SIAT), Chinese Academy of Sciences (CAS), supervised by Prof. Zhengkun Yi. I received my B.Eng. degree from Dalian University of Technology (DUT).
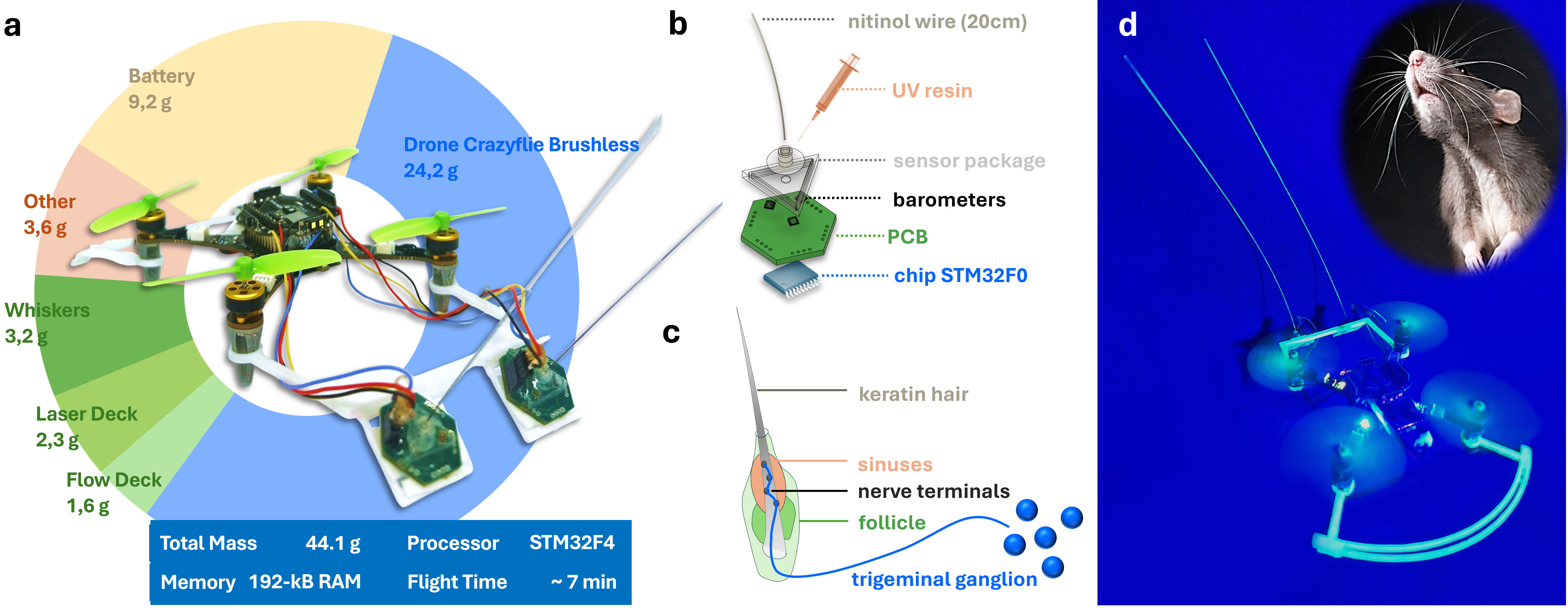
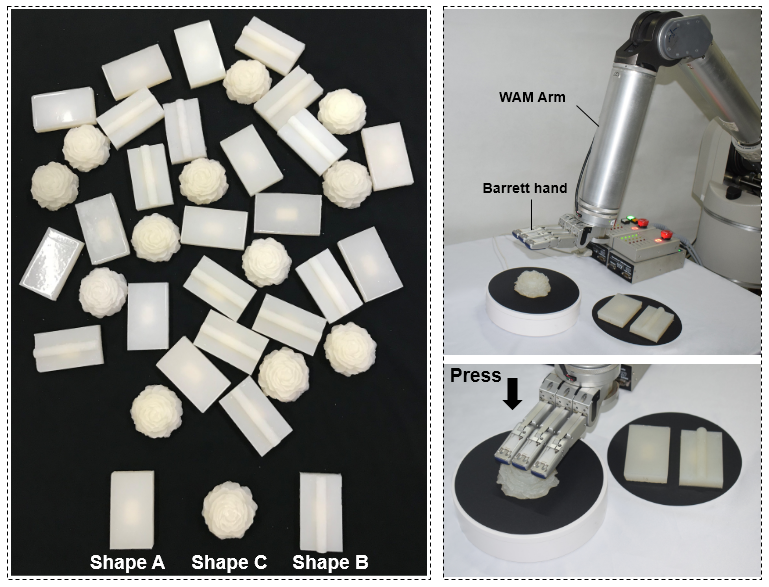
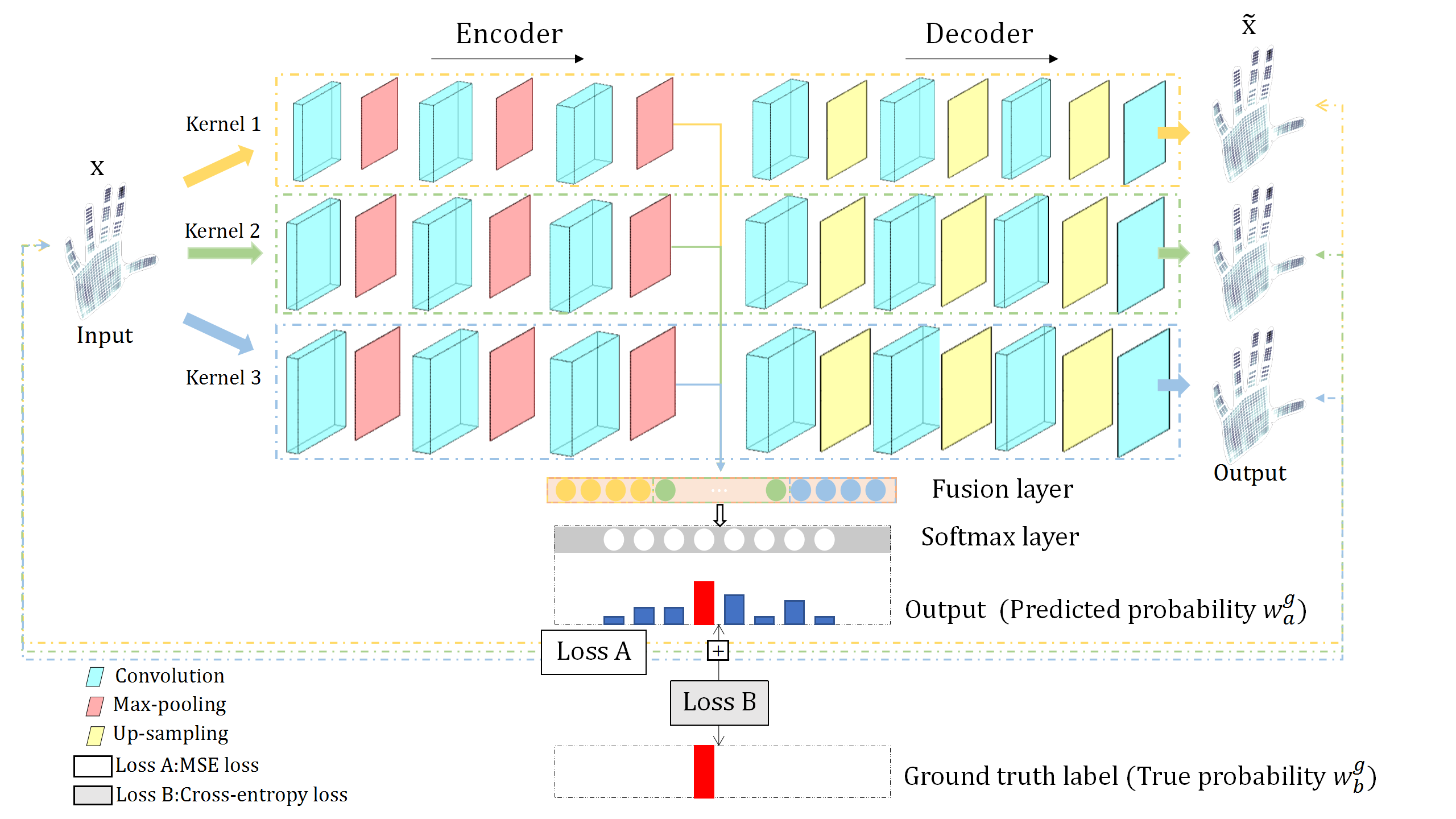
My research focuses on tactile aerial intelligence: enabling small aerial robots to perceive, navigate, and interact with the physical world through touch. I develop lightweight tactile sensors, learning-based perception methods, and closed-loop control strategies for contact-rich robotic systems.
I am particularly interested in tactile perception, aerial physical interaction, embodied AI, multimodal sensing, and compact robot learning systems that can operate on resource-constrained platforms.